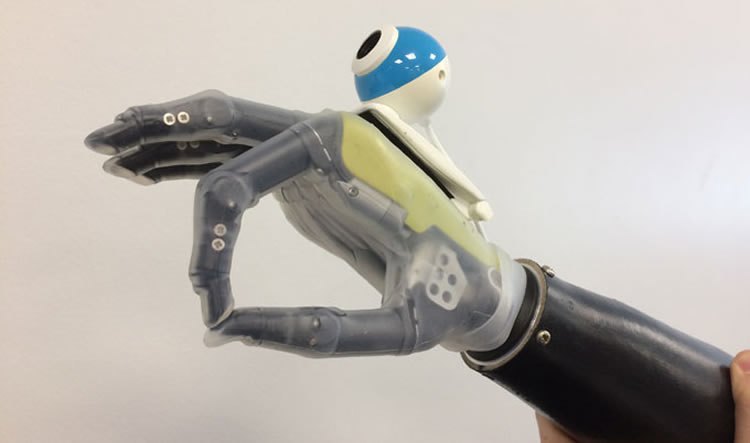
Ghazal Ghazai and Newcastle University colleagues have developed a deep learning driven prosthetic hand + camera system that allow wearers to reach for objects automatically. Current prosthetic hands are controlled via a user’s myoelectric signals, requiring learning, practice, concentration and time.
A convolutional neural network was trained it with images of 500 graspable objects, and taught to recognize the grip needed for each. Objects were grouped by size, shape, and orientation, and the hand was programmed to perform four different grasps to accommodate them: palm wrist neutral (to pick up a cup); palm wrist pronated (to pick up the TV remote); tripod (thumb and two fingers), and pinch (thumb and first finger).
The hand’s camera takes a picture of the object in front of it, assesses its shape and size, picks the most appropriate grasp, and triggers a series of hand movements, within milliseconds.
In a small study of the technology, subjects successfully picked up and moved objects with an 88 per cent success rate.
The work is part of an effort to develop a bionic hand that senses pressure and temperature, and transmits the information to the brain.
Join ApplySci at Wearable Tech + Digital Health + NeuroTech Boston on September 19, 2017 at the MIT Media Lab. Featuring Joi Ito – Ed Boyden – Roz Picard – George Church – Nathan Intrator – Tom Insel – John Rogers – Jamshid Ghajar – Phillip Alvelda